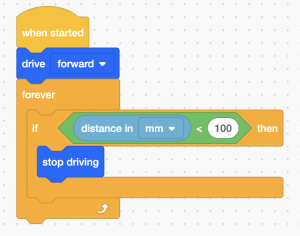
Instructions (Part I): The below code shows how to use the distance sensor on the robot. Recreate the code below, click play, and observe what happens.
Instructions (Part II): Reflect on your program from “Part I”. Modify your code so that your robot approaches all walls of its environment “forever” using the distance sensor.