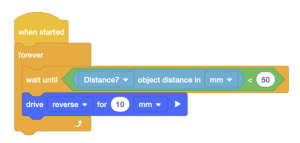
Instructions (Part II): Recreate and download the code below which directs your Clawbot to move when an object is placed in front of the Distance Sensor. The Distance Sensor reports the numbered distance between an object and the Sensor. When an object (your hand) is closer to the Distance Sensor, the reading will be a smaller number. In order to start driving, the Clawbot must wait until the Distance Sensor reading is less than the designated amount.