Instructions (Part III):
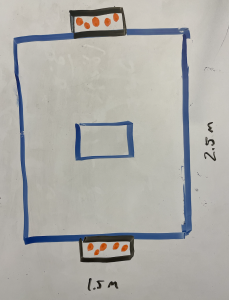
Remote Control Competition: Load your “Remote Control” system from Day 1. One Clawbot is to report to one bin and the other Clawbot to the other bin on the other side. Place all 10 balls in the small box middle of the “arena” in the small. When you are ready, start a timer for 2 minutes. During that time, each team is responsible for controlling their Clawbot, harvsting as many balls as possible, and returning them safely to their plastic bin. The team with more balls after 2 minutes wins. Alter the competition/coding/structure as needed and feel free to develop your own competition bracket, compete against other teams, etc.